以及数学基础四元数和李群李代数。 VIO概述 VIO主要以摄像头和IMU两种传感器进行融合,目前紧融合居多。主要难点在于传感器在线标定,时间同步,以及后端优化(本系列主要以优化方法为主)。 预备基础数学知识:
”代数 四元数 学习 李代数“ 的搜索结果
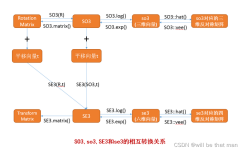
文章目录旋转的表示方式旋转向量旋转矩阵四元数三种方式之间转换旋转向量 ↔\leftrightarrow↔ 旋转矩阵旋转向量 ↔\leftrightarrow↔ 四元数旋转矩阵 ↔\leftrightarrow↔ 四元数李群李代数的性质指数与对数映射BCH...
在SLAM中经常会用到李群李代数与四元数来表示旋转变换,这些数学公式往往需要推导来推导去,分分钟搞到头都大了。但在SLAM中往往用到其中那么几个固定的性质,所以是没有必要对这些数学基础作过多深入的研究,只需要...

第三讲:李群与李代数.pptx
标签: SLAM
上一讲,我们介绍了三维世界中刚体运动的描述方式...通过李群——李代数间的转换关系,我们希望把位 姿估计变成无约束的优化问题,简化求解方式。由于读者可能还没有李群李代数的基本知 识,我们将从最基本的开始讲起。
李群与李代数3. imu4. VIO 一. 旋转与平移 1.1 旋转表示 — 旋转矩阵R 有坐标系 aaa,基为 a=[a1,a2,a3]a=\begin{bmatrix}a_1,&a_2,&a_3\end{bmatrix}a=[a1,a2,a3] (注:为3 ×\time


三维刚体运动、李群与李代数的一些知识点记录一、三维刚体旋转1.1 内积和外积1.2 旋转矩阵、变换矩阵和旋转向量1.2.1 旋转矩阵1.2.2 变换矩阵1.2.3 旋转向量1.3 欧拉角和四元数和姿态解算二、李群与李代数 ...


SLAM基础——李群李代数
标签: 算法

... 在三维空间中刚体运动的基础上,假设机器人某时刻的位姿为T (也就是世界坐标系到机器人坐标系的变换矩阵为T),它观察到了世界坐标为p的点,产生了观测数据z,则由坐标变换关系,得z=Tp+w,其中w为随机噪声。...
坐标旋转的表达模型,可以有旋转矩阵、欧拉角、四元数等多种, ...在代数上可以引入李群与李代数的概念,把这种空间结构认识清楚。 详细内容,可以查看本博的“今日头条号:机器人视觉”

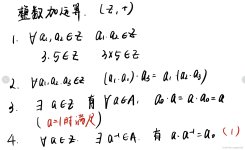
群是一种集合加上一种运算的代数结构。若集合A≠∅A\not=\varnothingA=∅,在AAA上的二元运算为⋅\cdot⋅,则群可以记作G=(A,⋅)G=(A,\cdot)G=(A,⋅)。群要求这个运算满足以下条件: 封闭性:∀a,b∈A,a⋅b∈A...

slam十四讲第四讲李群李代数
C++学习笔记——Sophus模块(李群/李代数)


由于欧拉角的缺点,而四元数旋转不存在万向节死锁问题,因此计算机中我们往往使用四元数来表示三维空间中的旋转信息。(1)同一旋转的表示不唯一很好理解,比如绕y轴旋转90度和450度效果是一样的,主要说万向节死锁...



推荐文章
- 阿里云企业邮箱的stmp服务器地址_阿里云stmp地址-程序员宅基地
- c++ 判断数学表达式有效性_高考数学大题如何"保分"?学霸教你六大绝招!...-程序员宅基地
- 处理office365登录出现服务器问题_o365登陆显示网络异常-程序员宅基地
- Nginx RTMP源码分析--ngx_rtmp_live_module源码分析之添加stream_ngx_rtmp_live_module 原理-程序员宅基地
- 基于Ansible+Python开发运维巡检工具_automation_inspector.tar.gz-程序员宅基地
- Linux Shell - if 语句和判断表达式_shell if elif-程序员宅基地
- python升序和降序排序_Python排序列表数组方法–通过示例解释升序和降序-程序员宅基地
- jenkins 构建前执行shell_Jenkins – 在构建之前执行脚本,然后让用户确认构建-程序员宅基地
- 如何完全卸载MySQL_mysql怎么卸载干净-程序员宅基地
- AndroidO Treble架构下HIDL服务查询过程_found dead hwbinder service-程序员宅基地